# 1 编写一个简单的 Linux 内核驱动
# 1.1 编写驱动
Linux 驱动实际就是一个 Linux 内核模块。
首先,我们需要理解什么是内核模块?简单来说,内核模块是一段 "固定格式" 的代码,像一个“插件”一样,linux 内核可以动态的加载并执行这段代码,也可以把这段代码编译进内核,在内核启动的时候来执行这段代码。
下面我们写一个简单的 linux 驱动,如果你对驱动开发还不太了解,可以先学习学习 Binder 的预备知识 (opens new window)的Linux驱动章节。
在内核的 common/drivers/char 目录中添加 hello_driver.c
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
/* 1. 确定主设备号 */
static int major = 0;
static char kernel_buf[1024];
static struct class *hello_class;
#define MIN(a, b) (a < b ? a : b)
/* 3. 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t hello_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
err = copy_to_user(buf, kernel_buf, MIN(1024, size));
return MIN(1024, size);
}
static ssize_t hello_drv_write (struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
err = copy_from_user(kernel_buf, buf, MIN(1024, size));
return MIN(1024, size);
}
static int hello_drv_open (struct inode *node, struct file *file)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return 0;
}
static int hello_drv_close (struct inode *node, struct file *file)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return 0;
}
/* 2. 定义自己的file_operations结构体 */
static struct file_operations hello_drv = {
.owner = THIS_MODULE,
.open = hello_drv_open,
.read = hello_drv_read,
.write = hello_drv_write,
.release = hello_drv_close,
};
/* 4. 把file_operations结构体告诉内核:注册驱动程序 */
/* 5. 谁来注册驱动程序啊?得有一个入口函数:安装驱动程序时,就会去调用这个入口函数 */
static int __init hello_init(void)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
major = register_chrdev(0, "hello", &hello_drv); /* /dev/hello */
//提供设备信息,自动创建设备节点。
// /dev/hello
hello_class = class_create(THIS_MODULE, "hello_class");
err = PTR_ERR(hello_class);
if (IS_ERR(hello_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "hello");
return -1;
}
device_create(hello_class, NULL, MKDEV(major, 0), NULL, "hello"); /* /dev/hello */
//到这里我们就可以通过 /dev/hello 文件来访问我们的驱动程序了。
return 0;
}
/* 6. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数 */
static void __exit hello_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(hello_class, MKDEV(major, 0));
class_destroy(hello_class);
unregister_chrdev(major, "hello");
}
/* 7. 其他完善:提供设备信息,自动创建设备节点*/
module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("GPL");
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
这里的驱动实现非常简单,即使简单的拷贝一下数据。
# 1.2 将模块编译进内核
接下来我们修改 common/drivers/char/Kconfig 文件,使得我们的 hello_driver 模块,能出现在内核的编译选项中。
在 Kconfig 文件中添加:
config HELLO_DRIVER_MODULE
bool "hello driver module support"
default y
2
3
然后在 common/drivers/char/Makefile 文件中添加:
obj-$(CONFIG_HELLO_DRIVER_MODULE) += hello_driver.o
当在 make menuconfig 编译菜单中选中了 hello module support, CONFIG_HELLO_MODULE 的值是 y,没有选中值是 m(我们定义的默认值是 y):
- obj-y += hello_driver.o 的意思是将 hello_driver.o 编译进内核
- obj-m += hello_driver.o 的意思是文件 hello_driver.o 作为"模块"进行编译,不会编译到内核,但是会生成一个独立的 "hello_driver.ko" 文件,可以使用 insmod 命令将模块加载到内核中
最后配置内核:
tools/bazel run //common:kernel_x86_64_config -- nconfig
进入 Device Drivers 选项:
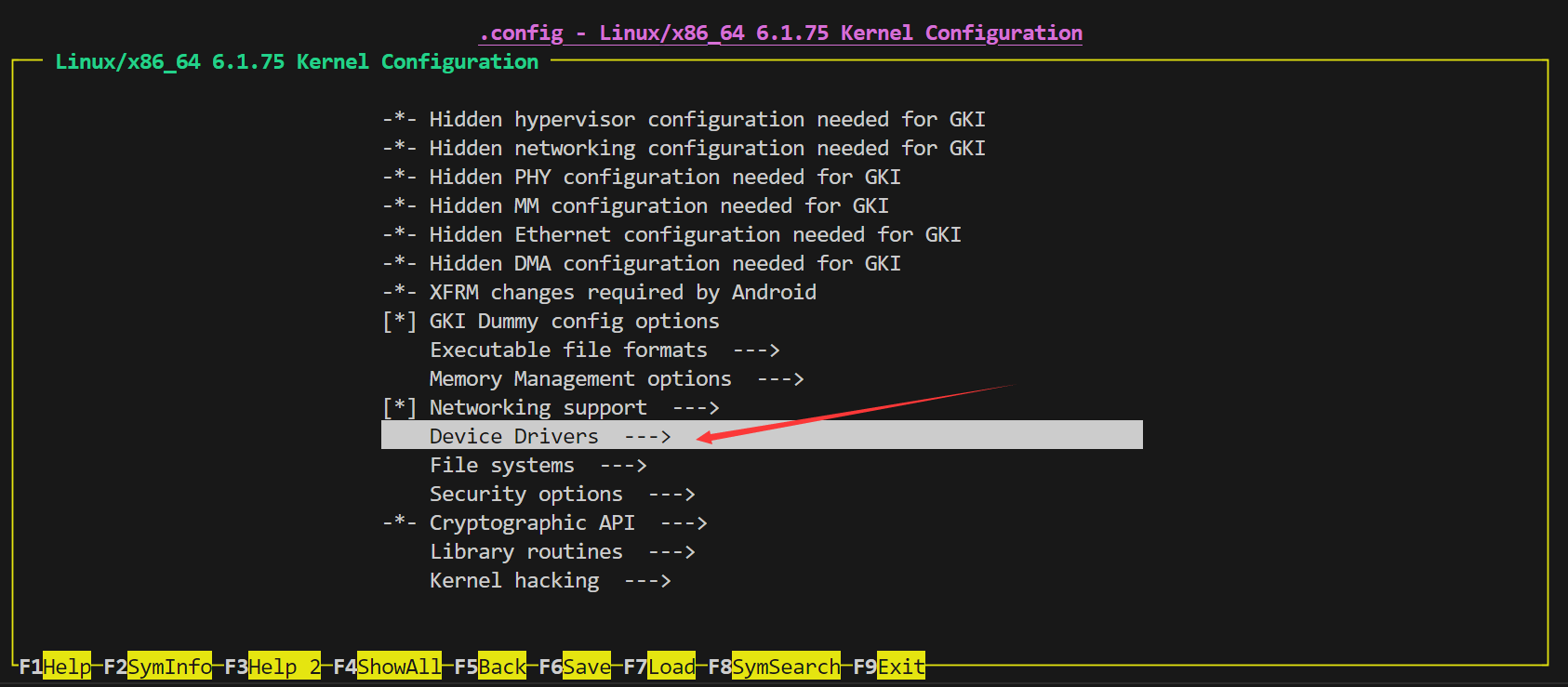
进入 Character devices
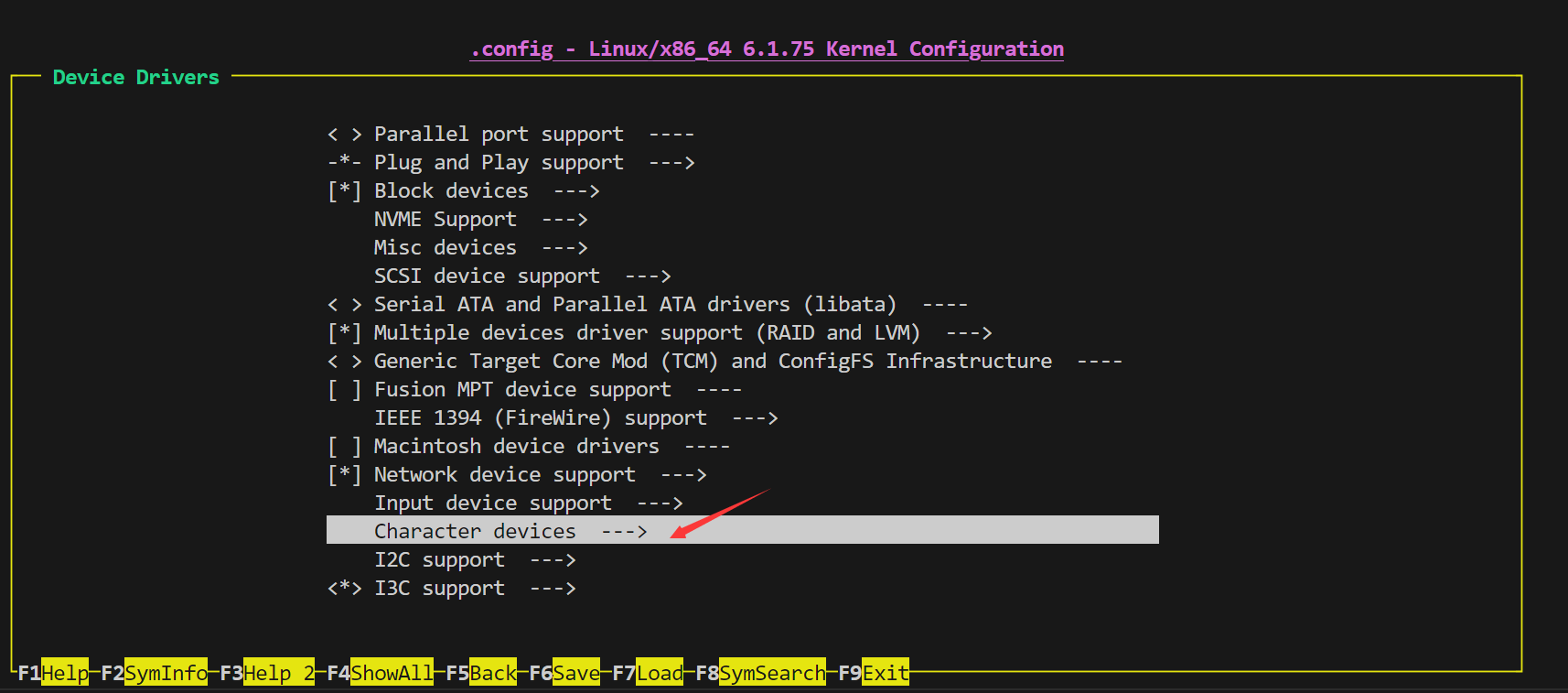
这里就可以看见我们刚才添加的选项,默认是选上的。
F9 退出即可。
然后重新编译:
tools/bazel run //common-modules/virtual-device:virtual_device_x86_64_dist
重新启动模拟器:
cvd start -kernel_path=/home/zzh0838/Project/aosp/kernel/out/virtual_device_x86_64/dist/bzImage -initramfs_path=/home/zzh0838/Project/aosp/kernel/out/virtual_device_x86_64/dist/initramfs.img
查看设备文件信息:
ls -l /dev/hello

# 2. 权限配置
要把驱动集成到系统中,还需要添加一些权限相关的配置:
在 system/core/rootdir/ueventd.rc 中添加:
/dev/hello 0666 root root
在 device/google/cuttlefish/sepolicy/device.te 中添加(如果文件不存在,创建文件):
type hello_dev_t, dev_type;
在 device/google/cuttlefish/sepolicy/file_contexts (如果文件不存在,创建文件):
/dev/hello u:object_r:hello_dev_t:s0
在 device/google/cuttlefish/vsoc_x86_64/phone/aosp_cf.mk 中添加:
BOARD_SEPOLICY_DIRS += \
device/google/cuttlefish/sepolicy
2
# 3. 写一个 Native 程序,测试我们的驱动程序
在 frameworks/base/native/ 目录下创建如下的目录结构:
hello_drv_test/
├── Android.bp
└── hello_drv_test.c
2
3
其中 hello_drv_test.c 的内容如下:
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
/*
* ./hello_drv_test -w abc
* ./hello_drv_test -r
*/
int main(int argc, char **argv)
{
int fd;
char buf[1024];
int len;
/* 1. 判断参数 */
if (argc < 2)
{
printf("Usage: %s -w <string>\n", argv[0]);
printf(" %s -r\n", argv[0]);
return -1;
}
/* 2. 打开文件 */
fd = open("/dev/hello", O_RDWR);
if (fd == -1)
{
printf("can not open file /dev/hello\n");
return -1;
}
/* 3. 写文件或读文件 */
if ((0 == strcmp(argv[1], "-w")) && (argc == 3))
{
len = strlen(argv[2]) + 1;
len = len < 1024 ? len : 1024;
write(fd, argv[2], len);
}
else
{
len = read(fd, buf, 1024);
buf[1023] = '\0';
printf("APP read : %s\n", buf);
}
close(fd);
return 0;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
测试程序的内容很简单,就是根据命令行参数读写 /dev/hello 文件。
接着编写 Android.bp 文件:
cc_binary {
name: "hello_drv_test",
srcs: ["hello_drv_test.c"], //源文件列表
cflags: ["-Werror"], //添加编译选项
}
2
3
4
5
编译程序并上传模拟器:
# 编译
cd frameworks/base/native/hello_drv_test
mm
# 打开模拟器,流程略
# 上传可执行文件
cd -
adb push out/target/product/vsoc_x86/system/bin/hello_drv_test /data/local/tmp
# 进入到模拟器 shell
adb shell
# 执行程序
cd /data/local/tmp
./hello_drv_test -w "hello"
./hello_drv_test -r
2
3
4
5
6
7
8
9
10
11
12
13
14
15
执行程序的结果如下所示: